MakeCode JoyCar Linetracking
Line-Tracking
Die Linefinder-Sensoren senden ein Infrarotsignal aus, welches wenn es auf einen hellen Untergrund trifft reflektiert wird und somit ein High-Signal (1) zurück gibt. Wenn das Infrarotsignal auf einen dunklen Untergrund, wie zum Beispiel eine aufgemalte schwarze Linie, trifft, wir das Signal nicht reflektiert und der Sensor gibt ein Low-Signal (0) zurück.
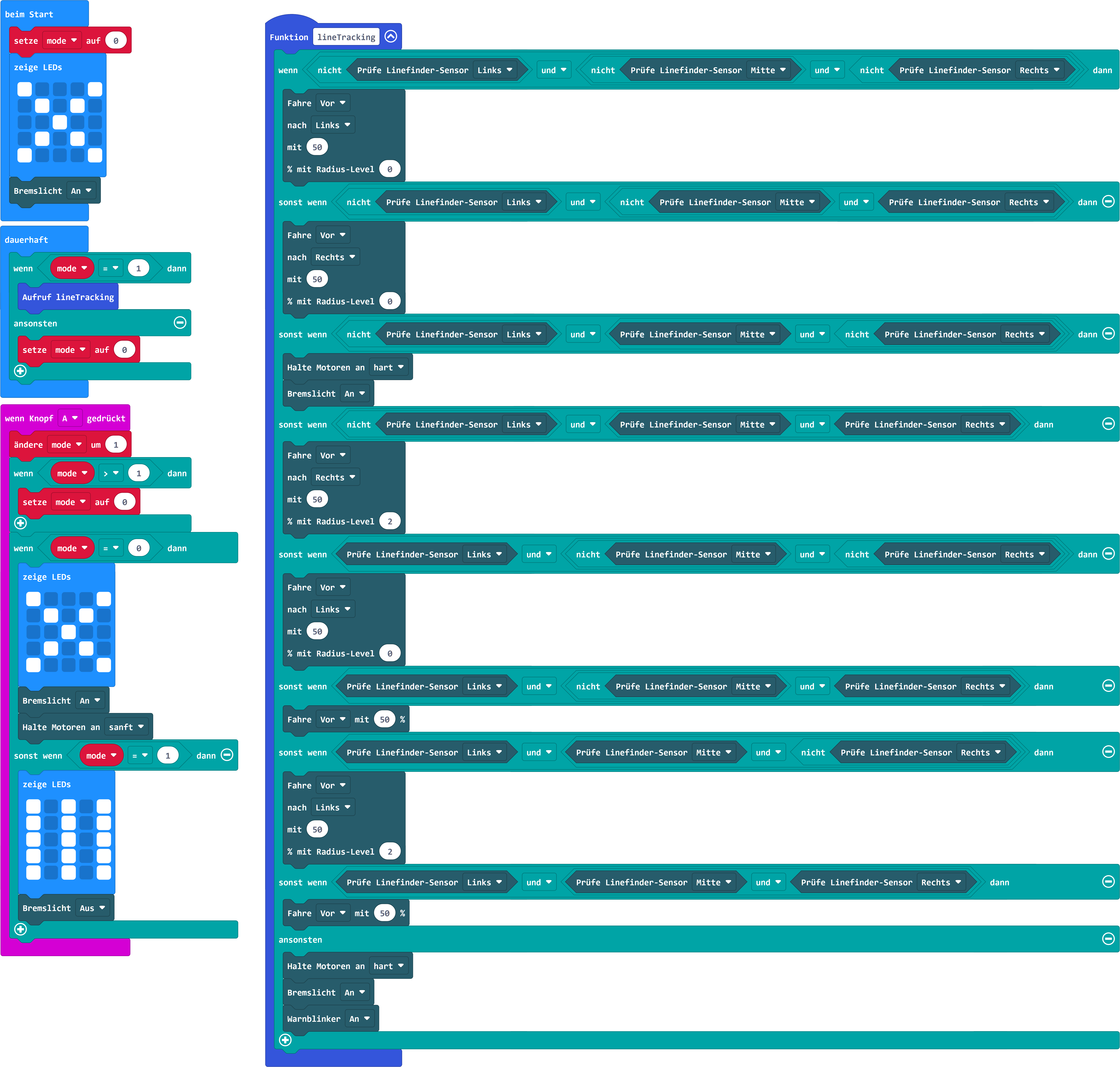
Dies ermöglicht es dem JoyCar, mit seinen drei Linefinder-Sensoren auf der Unterseite, vollkommen selbständig einer aufgemalten schwarzen Linie zu folgen. Dafür haben wir ein kleines Demo-Programm vorbereitet.
Mit dem Knopf A auf deinem micro:bit kannst du den Line-Tracking-Mode ein und ausschalten.
Zur besseren Übersicht, welche Aktion bei welchen Sensorwerten durchgeführt werden muss, haben wir hier eine Wahrheitstabelle erstellt.
| Linefinder Links | Linefinder Mitte | Linefinder Rechts | Aktion |
| 0 | 0 | 0 | geradeaus |
| 0 | 0 | 1 | leicht links |
| 0 | 1 | 0 | Stopp |
| 0 | 1 | 1 | links |
| 1 | 0 | 0 | leicht rechts |
| 1 | 0 | 1 | geradeaus |
| 1 | 1 | 0 | rechts |
| 1 | 1 | 1 | kreiseln |