MakeCode JoyCar Sensoren
Ultraschall-Sensor

Prüft den Ultraschallsensor auf die Entfernung zum nächstgelegenen erkannten Objekt. Die Funktion gibt die Entfernung als Antwort zurück.
Speed-Sensoren

Prüft den Linken/Rechten Speed-Sensor, ob das Signal durch die Lochscheibe unterbrochen wurde. Die Funktion gibt als Antwort Wahr oder Falsch (True/False) zurück.
Hindernis-Sensoren

Prüft den Linken/Rechten Hindernis-Sensor, ob ein Hindernis erkannt wurde. Die Funktion gibt als Antwort Wahr oder Falsch (True/False) zurück.
Linefinder-Sensoren

Prüft den Linken/Mittleren/Rechten Linefinder-Sensor, ob eine Linie auf dem Boden erkannt werden konnte. Die Funktion gibt als Antwort Wahr oder Falsch (True/False) zurück.
01 Sensoren
In diesem Beispiel wird, sobald der Knopf A gedrückt wird, die Entfernung zum nächstgelegenen Objekt über den Ultraschallsensor gemessen und angezeigt.

02 Sensoren
Für dieses Beispiel muss das Joy-Car auf einem weißen Blatt Papier stehen. Wird nun ein schwarzer Streifen unter einen der drei Linefinder-Sensoren geschoben, so erscheint auf dem Display des Micro:bits eine Linie. Die Linie ist, entsprechend dem verwendeten Sensor, links, mittig oder rechts angeordnet. Wird der schwarze Streifen unter den linken oder rechten Linefinder-Sensor geschoben, so wird zusätzlich der entsprechende Blinker aktiviert.

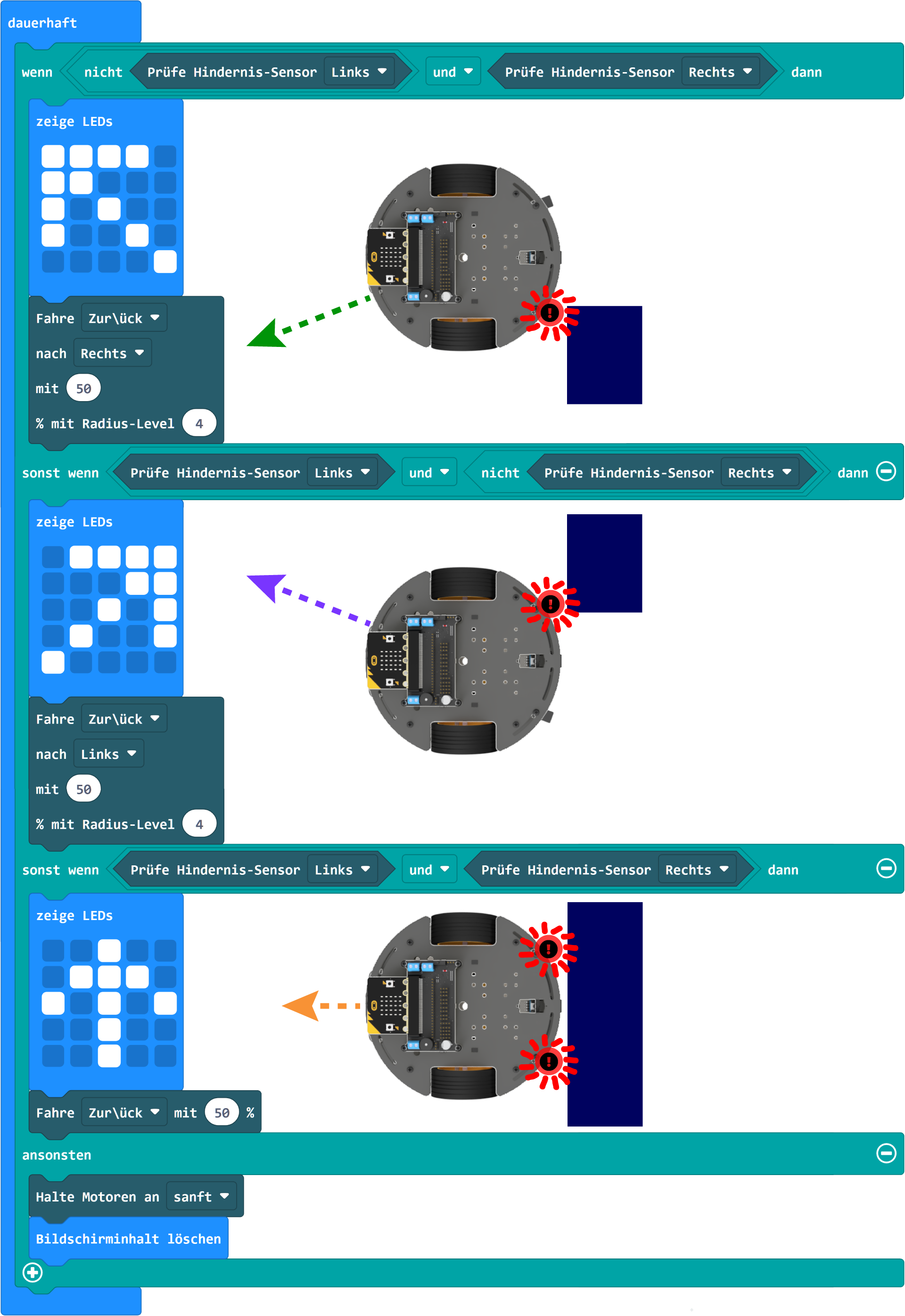
03 Sensoren
In diesem Beispiel werden die Hindernis-Sensoren aktiviert. Sobald ein Hindernis vor das Joy-Car geschoben wird, fährt das Joy-Car automatisch auf eine bestimmte Distanz zurück.
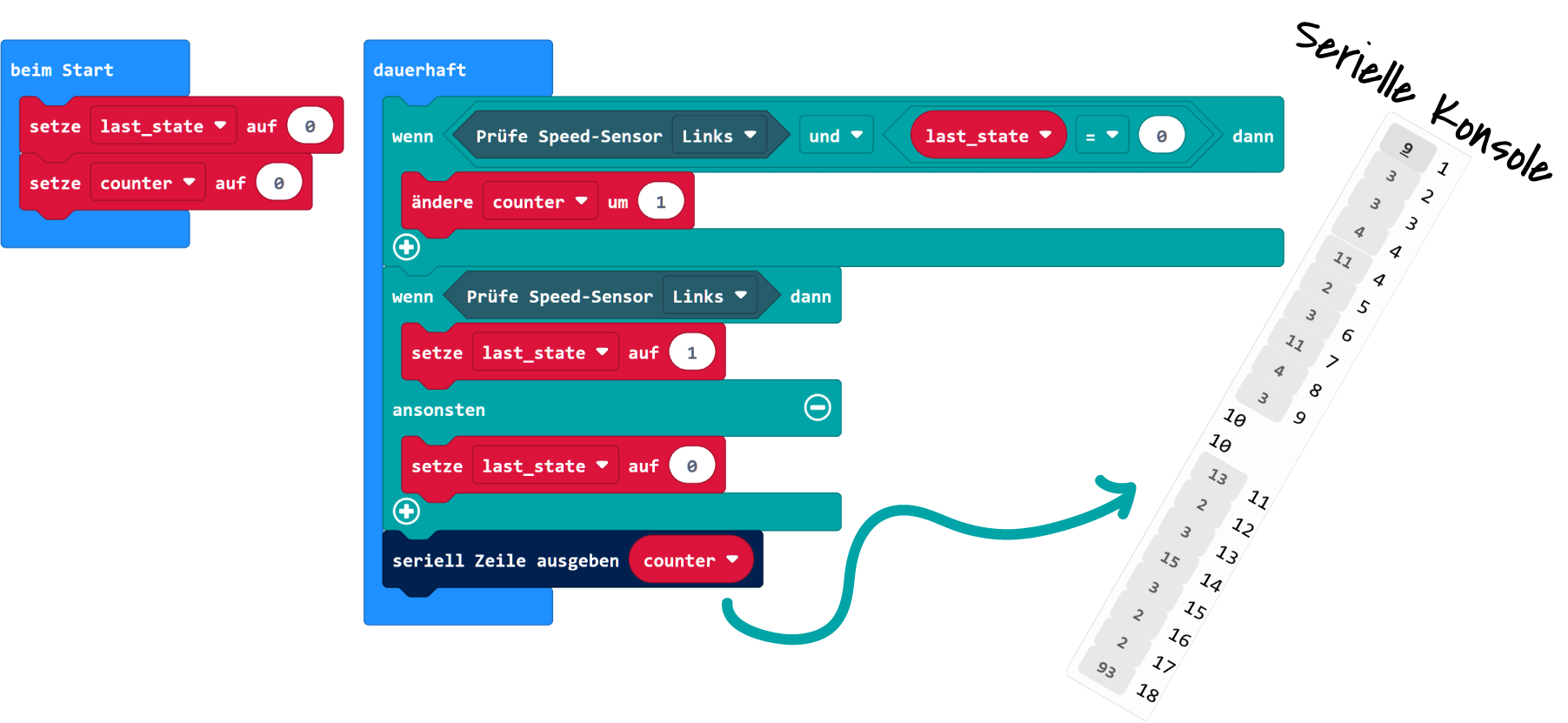
04 Sensoren
In diesem Beispiel wird der Geschwindigkeits-Sensor aktiviert. Das linke Rad des Joy-Cars kann hier von Hand gedreht werden. Die Lochscheibenfelder werden dann automatisch gezählt und über die serielle Schnittstelle auf der Konsole ausgegeben.
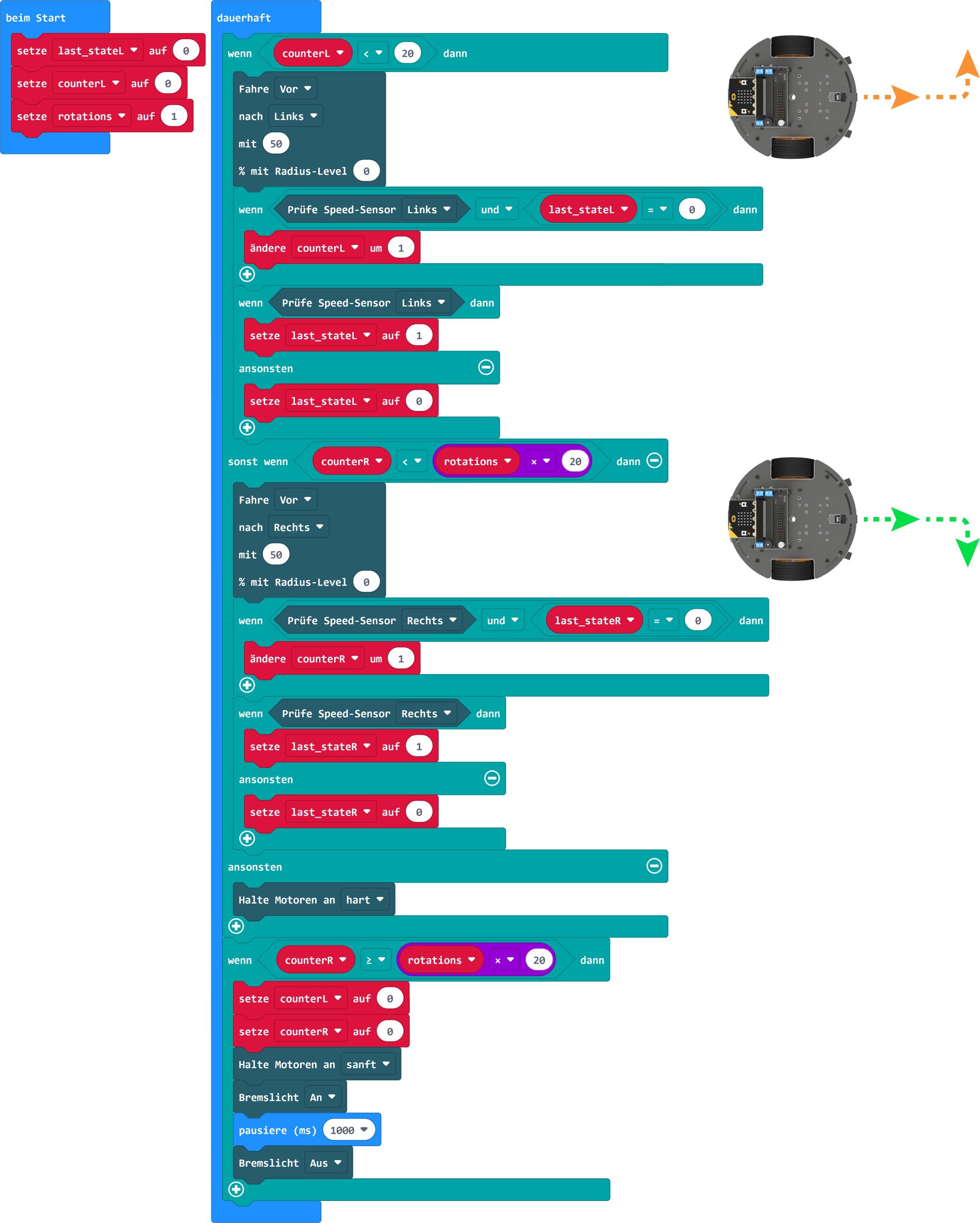
05 Sensoren
Hier werden die Geschwindigkeits-Sensoren verwendet um nacheinander jeweils eine volle Umdrehung pro Rad zu drehen.
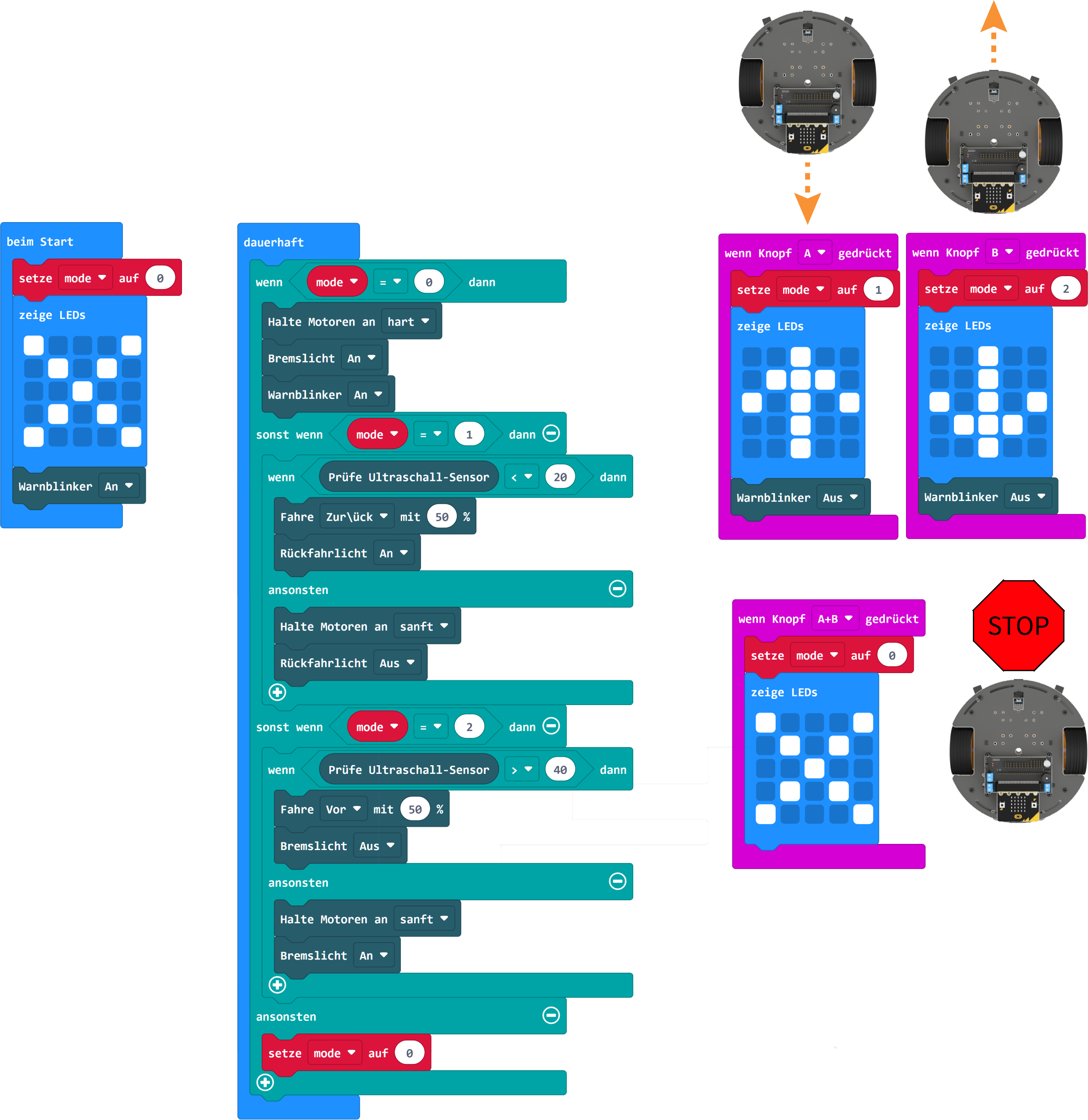
06 Sensoren
In diesem Beispiel fährt das Joy-Car automatisch auf einen bestimmten Abstand zum nächstgelegenen Objekt. Der Abstand wird hierbei über den Ultraschall-Sensor ermittelt. Es stehen insgesamt 3 Funktionen zur Verfügung, die über die Taste A, B und A+B durchgeschaltet werden können:
1: Fahre vorwärts und halte den Abstand ein
2: Fahre rückwärts und halte den Abstand ein
3: Stopp